DataLab Cup 2: CNN for Object Detection ¶
Fall 2025
Competition Info¶
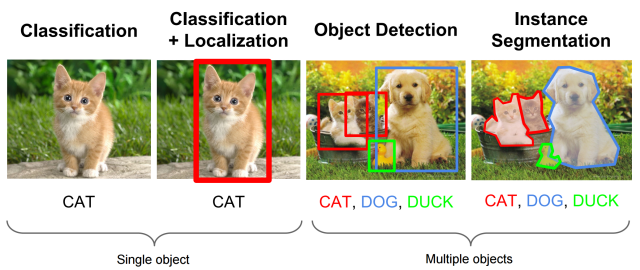
In this competition, you have to train a model that recognizes objects in an image. Your goal is to output bounding boxes for objects.
Platform: Kaggle¶
Problem description¶
Given an image(shape = [undefined, undefined, 3]), you need to output bounding box ($x_{min}$, $y_{min}$, $x_{max}$, $y_{max}$, class_label, confidence_score) for objects showed in image and its class.(picture source)
Data provided¶
Dataset: PASCAL VOC2007¶
The dataset contains 20 classes. The train/val data has 5012 images containing 12608 annotated objects. We have preprocessed training dataset(5012 images) and testing dataset(4953 images) for you. You can download them on Kaggle.
classes_name = ["aeroplane", "bicycle", "bird", "boat", "bottle",
"bus", "car", "cat", "chair", "cow", "diningtable",
"dog", "horse", "motorbike", "person", "pottedplant",
"sheep", "sofa", "train","tvmonitor"]
Processed data format¶
The information for each image of training data are recorded in VOCdevkit_train/VOC2007/Annotations. However, we have processed those files for you into one record file: pascal_voc_training_data.txt in which each line records informations of each training images.
The data format of pascal_voc_training_data is:
[$image\_name$ $xmin_i$ $ymin_i$ $xmax_i$ $ymax_i$ $class_i$] (repeat number of objects times)
Elements are separated by space.
training_data_file = open("./pascal_voc_training_data.txt", "r")
for i, line in enumerate(training_data_file):
if i >5:
break
line = line.strip()
print(line)
000005.jpg 263 211 324 339 8 165 264 253 372 8 5 244 67 374 8 241 194 295 299 8 277 186 312 220 8 000007.jpg 141 50 500 330 6 000009.jpg 69 172 270 330 12 150 141 229 284 14 285 201 327 331 14 258 198 297 329 14 000012.jpg 156 97 351 270 6 000016.jpg 92 72 305 473 1 000017.jpg 185 62 279 199 14 90 78 403 336 12
As you can see, one image may have multiple objects. Another thing to note is, the heights and widths of the images in this datset are different. Therefore, you are suggested to reshape images and ground truth bounding boxes' coordinates into same size.
In this competition, you can implement all kinds of object detection models (R-CNN, Fast-RCNN, Faster-RCNN, YOLOs, SSD,...etc.). Here we provide a simple template based on YOLO(You Only Look Once).
import tensorflow as tf
import numpy as np
gpus = tf.config.experimental.list_physical_devices('GPU')
if gpus:
try:
# Currently, memory growth needs to be the same across GPUs
for gpu in gpus:
tf.config.experimental.set_memory_growth(gpu, True)
# Select GPU number 1
tf.config.experimental.set_visible_devices(gpus[0], 'GPU')
logical_gpus = tf.config.experimental.list_logical_devices('GPU')
print(len(gpus), "Physical GPUs,", len(logical_gpus), "Logical GPUs")
except RuntimeError as e:
# Memory growth must be set before GPUs have been initialized
print(e)
3 Physical GPUs, 1 Logical GPUs
- Hyperparameters
# common params
IMAGE_SIZE = 448
BATCH_SIZE = 8
NUM_CLASSES = 20
MAX_OBJECTS_PER_IMAGE = 20
# dataset params
DATA_PATH = './pascal_voc_training_data.txt'
IMAGE_DIR = './VOCdevkit_train/VOC2007/JPEGImages/'
# model params
CELL_SIZE = 7
BOXES_PER_CELL = 2
OBJECT_SCALE = 1
NOOBJECT_SCALE = 0.5
CLASS_SCALE = 1
COORD_SCALE = 5
# training params
LEARNING_RATE = 1e-4
EPOCHS = 3
Dataset Loader¶
We define a class especially to process training data, reading the records from pascal_voc_training_data.txt and follow the steps below to prepare data for our network:
- Create Dataset using tensorflow data API.
- In Dataset map function, read images and do preprocessing(ex. resizing , normalization).
- In Dataset map function, change box information
[xmin, ymin, xmax, ymax]coordinates into[xcenter, ycenter, width, height]attributes, which is easier for YOLO model to use. - Batch, Shuffle operations.
class DatasetGenerator:
"""
Load pascalVOC 2007 dataset and creates an input pipeline.
- Reshapes images into 448 x 448
- converts [0 1] to [-1 1]
- shuffles the input
- builds batches
"""
def __init__(self):
self.image_names = []
self.record_list = []
self.object_num_list = []
# filling the record_list
input_file = open(DATA_PATH, 'r')
for line in input_file:
line = line.strip()
ss = line.split(' ')
self.image_names.append(ss[0])
self.record_list.append([float(num) for num in ss[1:]])
self.object_num_list.append(min(len(self.record_list[-1])//5,
MAX_OBJECTS_PER_IMAGE))
if len(self.record_list[-1]) < MAX_OBJECTS_PER_IMAGE*5:
# if there are objects less than MAX_OBJECTS_PER_IMAGE, pad the list
self.record_list[-1] = self.record_list[-1] +\
[0., 0., 0., 0., 0.]*\
(MAX_OBJECTS_PER_IMAGE-len(self.record_list[-1])//5)
elif len(self.record_list[-1]) > MAX_OBJECTS_PER_IMAGE*5:
# if there are objects more than MAX_OBJECTS_PER_IMAGE, crop the list
self.record_list[-1] = self.record_list[-1][:MAX_OBJECTS_PER_IMAGE*5]
def _data_preprocess(self, image_name, raw_labels, object_num):
image_file = tf.io.read_file(IMAGE_DIR+image_name)
image = tf.io.decode_jpeg(image_file, channels=3)
h = tf.shape(image)[0]
w = tf.shape(image)[1]
width_ratio = IMAGE_SIZE * 1.0 / tf.cast(w, tf.float32)
height_ratio = IMAGE_SIZE * 1.0 / tf.cast(h, tf.float32)
image = tf.image.resize(image, size=[IMAGE_SIZE, IMAGE_SIZE])
image = (image/255) * 2 - 1
raw_labels = tf.cast(tf.reshape(raw_labels, [-1, 5]), tf.float32)
xmin = raw_labels[:, 0]
ymin = raw_labels[:, 1]
xmax = raw_labels[:, 2]
ymax = raw_labels[:, 3]
class_num = raw_labels[:, 4]
xcenter = (xmin + xmax) * 1.0 / 2.0 * width_ratio
ycenter = (ymin + ymax) * 1.0 / 2.0 * height_ratio
box_w = (xmax - xmin) * width_ratio
box_h = (ymax - ymin) * height_ratio
labels = tf.stack([xcenter, ycenter, box_w, box_h, class_num], axis=1)
return image, labels, tf.cast(object_num, tf.int32)
def generate(self):
dataset = tf.data.Dataset.from_tensor_slices((self.image_names,
np.array(self.record_list),
np.array(self.object_num_list)))
dataset = dataset.shuffle(100000)
dataset = dataset.map(self._data_preprocess,
num_parallel_calls = tf.data.experimental.AUTOTUNE)
dataset = dataset.batch(BATCH_SIZE)
dataset = dataset.prefetch(buffer_size=200)
return dataset
Now we can simply new a DatasetGenerator which can provide batches of training data for our model.
Object Detection Model (YOLO)¶
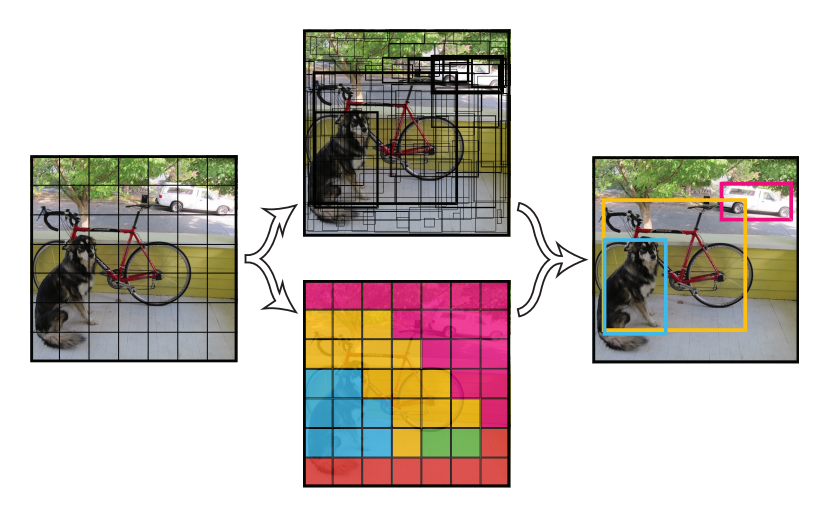
Different from Region Proposal based model, YOLO divide an image into cell_size$\times$cell_size (say 7$\times$7) cells, each has fixed number of output prediction boxes(coordinates, class_number, and confidence score). The final prediction would be the boxes with highest confidence score. The prediction of YOLO can be based on the output features extracted by the convolutional layers on the input image, which is actually "look once" on each image.
Intersection Over Union(IoU)¶
The loss calculation of YOLO includes calculating the intersection over union between the predicted boxes and the ground truth boxes. IoU is a common way to evaluate whether the predicted box coordinate is precise enough or not. The calcuation of iou is
$$Predicted\_Box\cap GroundTruth\_Box \over{Predicted\_Box\cup GroundTruth\_Box}$$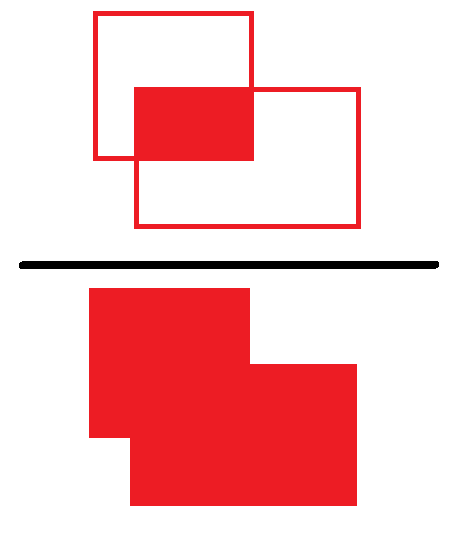
So we would like the IoU of our prediction and the ground the larger the better. In addition, IoU is also used when we evaluate an object detection model is good or not: the prediction is success if the IoU of the predicted box and the ground truth is larger than a threshould.
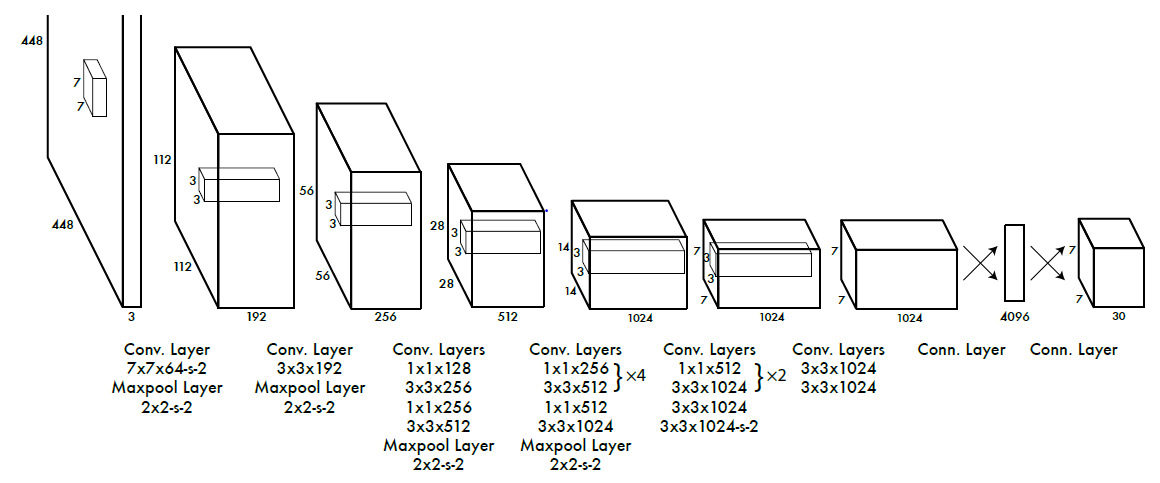
Model Architecture¶
24 convolution layers followed by 2 fully connected layers.
Use a linear activation function for the final layer and all other layers use the following leaky rectified linear activation:
model¶
from tensorflow import keras
from tensorflow.keras import layers
def conv_leaky_relu(inputs, filters, size, stride):
x = layers.Conv2D(filters, size, stride, padding="same",
kernel_initializer=tf.keras.initializers.TruncatedNormal())(inputs)
x = layers.LeakyReLU(0.1)(x)
return x
img_inputs = keras.Input(shape=(IMAGE_SIZE, IMAGE_SIZE, 3))
x = conv_leaky_relu(img_inputs, 64, 7, 2)
x = layers.MaxPool2D()(x)
x = conv_leaky_relu(x, 192, 3, 1)
x = layers.MaxPool2D()(x)
x = conv_leaky_relu(x, 128, 1, 1)
x = conv_leaky_relu(x, 256, 3, 1)
x = conv_leaky_relu(x, 256, 1, 1)
x = conv_leaky_relu(x, 512, 3, 1)
x = layers.MaxPool2D()(x)
x = conv_leaky_relu(x, 256, 1, 1)
x = conv_leaky_relu(x, 512, 3, 1)
x = conv_leaky_relu(x, 256, 1, 1)
x = conv_leaky_relu(x, 512, 3, 1)
x = conv_leaky_relu(x, 256, 1, 1)
x = conv_leaky_relu(x, 512, 3, 1)
x = conv_leaky_relu(x, 256, 1, 1)
x = conv_leaky_relu(x, 512, 3, 1)
x = conv_leaky_relu(x, 512, 1, 1)
x = conv_leaky_relu(x, 1024, 3, 1)
x = layers.MaxPool2D()(x)
x = conv_leaky_relu(x, 512, 1, 1)
x = conv_leaky_relu(x, 1024, 3, 1)
x = conv_leaky_relu(x, 512, 1, 1)
x = conv_leaky_relu(x, 1024, 3, 1)
x = conv_leaky_relu(x, 1024, 3, 1)
x = conv_leaky_relu(x, 1024, 3, 2)
x = conv_leaky_relu(x, 1024, 3, 1)
x = conv_leaky_relu(x, 1024, 3, 1)
x = layers.Flatten()(x)
x = layers.Dense(4096,
kernel_initializer=tf.keras.initializers.TruncatedNormal(stddev=0.01))(x)
x = layers.LeakyReLU(0.1)(x)
outputs = layers.Dense(1470,
kernel_initializer=tf.keras.initializers.TruncatedNormal(stddev=0.01))(x)
YOLO = keras.Model(inputs=img_inputs, outputs=outputs, name="YOLO")
YOLO.summary()
Model: "YOLO" _________________________________________________________________ Layer (type) Output Shape Param # ================================================================= input_1 (InputLayer) [(None, 448, 448, 3)] 0 _________________________________________________________________ conv2d (Conv2D) (None, 224, 224, 64) 9472 _________________________________________________________________ leaky_re_lu (LeakyReLU) (None, 224, 224, 64) 0 _________________________________________________________________ max_pooling2d (MaxPooling2D) (None, 112, 112, 64) 0 _________________________________________________________________ conv2d_1 (Conv2D) (None, 112, 112, 192) 110784 _________________________________________________________________ leaky_re_lu_1 (LeakyReLU) (None, 112, 112, 192) 0 _________________________________________________________________ max_pooling2d_1 (MaxPooling2 (None, 56, 56, 192) 0 _________________________________________________________________ conv2d_2 (Conv2D) (None, 56, 56, 128) 24704 _________________________________________________________________ leaky_re_lu_2 (LeakyReLU) (None, 56, 56, 128) 0 _________________________________________________________________ conv2d_3 (Conv2D) (None, 56, 56, 256) 295168 _________________________________________________________________ leaky_re_lu_3 (LeakyReLU) (None, 56, 56, 256) 0 _________________________________________________________________ conv2d_4 (Conv2D) (None, 56, 56, 256) 65792 _________________________________________________________________ leaky_re_lu_4 (LeakyReLU) (None, 56, 56, 256) 0 _________________________________________________________________ conv2d_5 (Conv2D) (None, 56, 56, 512) 1180160 _________________________________________________________________ leaky_re_lu_5 (LeakyReLU) (None, 56, 56, 512) 0 _________________________________________________________________ max_pooling2d_2 (MaxPooling2 (None, 28, 28, 512) 0 _________________________________________________________________ conv2d_6 (Conv2D) (None, 28, 28, 256) 131328 _________________________________________________________________ leaky_re_lu_6 (LeakyReLU) (None, 28, 28, 256) 0 _________________________________________________________________ conv2d_7 (Conv2D) (None, 28, 28, 512) 1180160 _________________________________________________________________ leaky_re_lu_7 (LeakyReLU) (None, 28, 28, 512) 0 _________________________________________________________________ conv2d_8 (Conv2D) (None, 28, 28, 256) 131328 _________________________________________________________________ leaky_re_lu_8 (LeakyReLU) (None, 28, 28, 256) 0 _________________________________________________________________ conv2d_9 (Conv2D) (None, 28, 28, 512) 1180160 _________________________________________________________________ leaky_re_lu_9 (LeakyReLU) (None, 28, 28, 512) 0 _________________________________________________________________ conv2d_10 (Conv2D) (None, 28, 28, 256) 131328 _________________________________________________________________ leaky_re_lu_10 (LeakyReLU) (None, 28, 28, 256) 0 _________________________________________________________________ conv2d_11 (Conv2D) (None, 28, 28, 512) 1180160 _________________________________________________________________ leaky_re_lu_11 (LeakyReLU) (None, 28, 28, 512) 0 _________________________________________________________________ conv2d_12 (Conv2D) (None, 28, 28, 256) 131328 _________________________________________________________________ leaky_re_lu_12 (LeakyReLU) (None, 28, 28, 256) 0 _________________________________________________________________ conv2d_13 (Conv2D) (None, 28, 28, 512) 1180160 _________________________________________________________________ leaky_re_lu_13 (LeakyReLU) (None, 28, 28, 512) 0 _________________________________________________________________ conv2d_14 (Conv2D) (None, 28, 28, 512) 262656 _________________________________________________________________ leaky_re_lu_14 (LeakyReLU) (None, 28, 28, 512) 0 _________________________________________________________________ conv2d_15 (Conv2D) (None, 28, 28, 1024) 4719616 _________________________________________________________________ leaky_re_lu_15 (LeakyReLU) (None, 28, 28, 1024) 0 _________________________________________________________________ max_pooling2d_3 (MaxPooling2 (None, 14, 14, 1024) 0 _________________________________________________________________ conv2d_16 (Conv2D) (None, 14, 14, 512) 524800 _________________________________________________________________ leaky_re_lu_16 (LeakyReLU) (None, 14, 14, 512) 0 _________________________________________________________________ conv2d_17 (Conv2D) (None, 14, 14, 1024) 4719616 _________________________________________________________________ leaky_re_lu_17 (LeakyReLU) (None, 14, 14, 1024) 0 _________________________________________________________________ conv2d_18 (Conv2D) (None, 14, 14, 512) 524800 _________________________________________________________________ leaky_re_lu_18 (LeakyReLU) (None, 14, 14, 512) 0 _________________________________________________________________ conv2d_19 (Conv2D) (None, 14, 14, 1024) 4719616 _________________________________________________________________ leaky_re_lu_19 (LeakyReLU) (None, 14, 14, 1024) 0 _________________________________________________________________ conv2d_20 (Conv2D) (None, 14, 14, 1024) 9438208 _________________________________________________________________ leaky_re_lu_20 (LeakyReLU) (None, 14, 14, 1024) 0 _________________________________________________________________ conv2d_21 (Conv2D) (None, 7, 7, 1024) 9438208 _________________________________________________________________ leaky_re_lu_21 (LeakyReLU) (None, 7, 7, 1024) 0 _________________________________________________________________ conv2d_22 (Conv2D) (None, 7, 7, 1024) 9438208 _________________________________________________________________ leaky_re_lu_22 (LeakyReLU) (None, 7, 7, 1024) 0 _________________________________________________________________ conv2d_23 (Conv2D) (None, 7, 7, 1024) 9438208 _________________________________________________________________ leaky_re_lu_23 (LeakyReLU) (None, 7, 7, 1024) 0 _________________________________________________________________ flatten (Flatten) (None, 50176) 0 _________________________________________________________________ dense (Dense) (None, 4096) 205524992 _________________________________________________________________ leaky_re_lu_24 (LeakyReLU) (None, 4096) 0 _________________________________________________________________ dense_1 (Dense) (None, 1470) 6022590 ================================================================= Total params: 271,703,550 Trainable params: 271,703,550 Non-trainable params: 0 _________________________________________________________________
Define loss¶
# base boxes (for loss calculation)
base_boxes = np.zeros([CELL_SIZE, CELL_SIZE, 4])
# initializtion for each cell
for y in range(CELL_SIZE):
for x in range(CELL_SIZE):
base_boxes[y, x, :] = [IMAGE_SIZE / CELL_SIZE * x,
IMAGE_SIZE / CELL_SIZE * y, 0, 0]
base_boxes = np.resize(base_boxes, [CELL_SIZE, CELL_SIZE, 1, 4])
base_boxes = np.tile(base_boxes, [1, 1, BOXES_PER_CELL, 1])
def yolo_loss(predicts, labels, objects_num):
"""
Add Loss to all the trainable variables
Args:
predicts: 4-D tensor [batch_size, cell_size, cell_size, num_classes + 5 * boxes_per_cell]
===> (num_classes, boxes_per_cell, 4 * boxes_per_cell)
labels : 3-D tensor of [batch_size, max_objects, 5]
objects_num: 1-D tensor [batch_size]
"""
loss = 0.
#you can parallel the code with tf.map_fn or tf.vectorized_map (big performance gain!)
for i in tf.range(BATCH_SIZE):
predict = predicts[i, :, :, :]
label = labels[i, :, :]
object_num = objects_num[i]
for j in tf.range(object_num):
results = losses_calculation(predict, label[j:j+1, :])
loss = loss + results
return loss/BATCH_SIZE
def iou(boxes1, boxes2):
"""calculate ious
Args:
boxes1: 4-D tensor [CELL_SIZE, CELL_SIZE, BOXES_PER_CELL, 4] ====> (x_center, y_center, w, h)
boxes2: 1-D tensor [4] ===> (x_center, y_center, w, h)
Return:
iou: 3-D tensor [CELL_SIZE, CELL_SIZE, BOXES_PER_CELL]
====> iou score for each cell
"""
#boxes1 : [4(xmin, ymin, xmax, ymax), cell_size, cell_size, boxes_per_cell]
boxes1 = tf.stack([boxes1[:, :, :, 0] - boxes1[:, :, :, 2] / 2, boxes1[:, :, :, 1] - boxes1[:, :, :, 3] / 2,
boxes1[:, :, :, 0] + boxes1[:, :, :, 2] / 2, boxes1[:, :, :, 1] + boxes1[:, :, :, 3] / 2])
#boxes1 : [cell_size, cell_size, boxes_per_cell, 4(xmin, ymin, xmax, ymax)]
boxes1 = tf.transpose(boxes1, [1, 2, 3, 0])
boxes2 = tf.stack([boxes2[0] - boxes2[2] / 2, boxes2[1] - boxes2[3] / 2,
boxes2[0] + boxes2[2] / 2, boxes2[1] + boxes2[3] / 2])
#calculate the left up point of boxes' overlap area
lu = tf.maximum(boxes1[:, :, :, 0:2], boxes2[0:2])
#calculate the right down point of boxes overlap area
rd = tf.minimum(boxes1[:, :, :, 2:], boxes2[2:])
#intersection
intersection = rd - lu
#the size of the intersection area
inter_square = intersection[:, :, :, 0] * intersection[:, :, :, 1]
mask = tf.cast(intersection[:, :, :, 0] > 0, tf.float32) * tf.cast(intersection[:, :, :, 1] > 0, tf.float32)
#if intersection is negative, then the boxes don't overlap
inter_square = mask * inter_square
#calculate the boxs1 square and boxs2 square
square1 = (boxes1[:, :, :, 2] - boxes1[:, :, :, 0]) * (boxes1[:, :, :, 3] - boxes1[:, :, :, 1])
square2 = (boxes2[2] - boxes2[0]) * (boxes2[3] - boxes2[1])
return inter_square/(square1 + square2 - inter_square + 1e-6)
def losses_calculation(predict, label):
"""
calculate loss
Args:
predict: 3-D tensor [cell_size, cell_size, num_classes + 5 * boxes_per_cell]
label : [1, 5] (x_center, y_center, w, h, class)
"""
label = tf.reshape(label, [-1])
#Step A. calculate objects tensor [CELL_SIZE, CELL_SIZE]
#turn pixel position into cell position (corner)
min_x = (label[0] - label[2] / 2) / (IMAGE_SIZE / CELL_SIZE)
max_x = (label[0] + label[2] / 2) / (IMAGE_SIZE / CELL_SIZE)
min_y = (label[1] - label[3] / 2) / (IMAGE_SIZE / CELL_SIZE)
max_y = (label[1] + label[3] / 2) / (IMAGE_SIZE / CELL_SIZE)
min_x = tf.floor(min_x)
min_y = tf.floor(min_y)
max_x = tf.minimum(tf.math.ceil(max_x), CELL_SIZE)
max_y = tf.minimum(tf.math.ceil(max_y), CELL_SIZE)
#calculate mask of object with cells
onset = tf.cast(tf.stack([max_y - min_y, max_x - min_x]), dtype=tf.int32)
object_mask = tf.ones(onset, tf.float32)
offset = tf.cast(tf.stack([min_y, CELL_SIZE - max_y, min_x, CELL_SIZE - max_x]), tf.int32)
offset = tf.reshape(offset, (2, 2))
object_mask = tf.pad(object_mask, offset, "CONSTANT")
#Step B. calculate the coordination of object center and the corresponding mask
#turn pixel position into cell position (center)
center_x = label[0] / (IMAGE_SIZE / CELL_SIZE)
center_x = tf.floor(center_x)
center_y = label[1] / (IMAGE_SIZE / CELL_SIZE)
center_y = tf.floor(center_y)
response = tf.ones([1, 1], tf.float32)
#calculate the coordination of object center with cells
objects_center_coord = tf.cast(tf.stack([center_y, CELL_SIZE - center_y - 1,
center_x, CELL_SIZE - center_x - 1]),
tf.int32)
objects_center_coord = tf.reshape(objects_center_coord, (2, 2))
#make mask
response = tf.pad(response, objects_center_coord, "CONSTANT")
#Step C. calculate iou_predict_truth [CELL_SIZE, CELL_SIZE, BOXES_PER_CELL]
predict_boxes = predict[:, :, NUM_CLASSES + BOXES_PER_CELL:]
predict_boxes = tf.reshape(predict_boxes, [CELL_SIZE,
CELL_SIZE,
BOXES_PER_CELL, 4])
#cell position to pixel position
predict_boxes = predict_boxes * [IMAGE_SIZE / CELL_SIZE,
IMAGE_SIZE / CELL_SIZE,
IMAGE_SIZE, IMAGE_SIZE]
#if there's no predict_box in that cell, then the base_boxes will be calcuated with label and got iou equals 0
predict_boxes = base_boxes + predict_boxes
iou_predict_truth = iou(predict_boxes, label[0:4])
#calculate C tensor [CELL_SIZE, CELL_SIZE, BOXES_PER_CELL]
C = iou_predict_truth * tf.reshape(response, [CELL_SIZE, CELL_SIZE, 1])
#calculate I tensor [CELL_SIZE, CELL_SIZE, BOXES_PER_CELL]
I = iou_predict_truth * tf.reshape(response, [CELL_SIZE, CELL_SIZE, 1])
max_I = tf.reduce_max(I, 2, keepdims=True)
#replace large iou scores with response (object center) value
I = tf.cast((I >= max_I), tf.float32) * tf.reshape(response, (CELL_SIZE, CELL_SIZE, 1))
#calculate no_I tensor [CELL_SIZE, CELL_SIZE, BOXES_PER_CELL]
no_I = tf.ones_like(I, dtype=tf.float32) - I
p_C = predict[:, :, NUM_CLASSES:NUM_CLASSES + BOXES_PER_CELL]
#calculate truth x, y, sqrt_w, sqrt_h 0-D
x = label[0]
y = label[1]
sqrt_w = tf.sqrt(tf.abs(label[2]))
sqrt_h = tf.sqrt(tf.abs(label[3]))
#calculate predict p_x, p_y, p_sqrt_w, p_sqrt_h 3-D [CELL_SIZE, CELL_SIZE, BOXES_PER_CELL]
p_x = predict_boxes[:, :, :, 0]
p_y = predict_boxes[:, :, :, 1]
p_sqrt_w = tf.sqrt(tf.minimum(IMAGE_SIZE * 1.0, tf.maximum(0.0, predict_boxes[:, :, :, 2])))
p_sqrt_h = tf.sqrt(tf.minimum(IMAGE_SIZE * 1.0, tf.maximum(0.0, predict_boxes[:, :, :, 3])))
#calculate ground truth p 1-D tensor [NUM_CLASSES]
P = tf.one_hot(tf.cast(label[4], tf.int32), NUM_CLASSES, dtype=tf.float32)
#calculate predicted p_P 3-D tensor [CELL_SIZE, CELL_SIZE, NUM_CLASSES]
p_P = predict[:, :, 0:NUM_CLASSES]
#class_loss
class_loss = tf.nn.l2_loss(tf.reshape(object_mask, (CELL_SIZE, CELL_SIZE, 1)) * (p_P - P)) * CLASS_SCALE
#object_loss
object_loss = tf.nn.l2_loss(I * (p_C - C)) * OBJECT_SCALE
#noobject_loss
noobject_loss = tf.nn.l2_loss(no_I * (p_C)) * NOOBJECT_SCALE
#coord_loss
coord_loss = (tf.nn.l2_loss(I * (p_x - x)/(IMAGE_SIZE/CELL_SIZE)) +
tf.nn.l2_loss(I * (p_y - y)/(IMAGE_SIZE/CELL_SIZE)) +
tf.nn.l2_loss(I * (p_sqrt_w - sqrt_w))/IMAGE_SIZE +
tf.nn.l2_loss(I * (p_sqrt_h - sqrt_h))/IMAGE_SIZE) * COORD_SCALE
return class_loss + object_loss + noobject_loss + coord_loss
Start Training¶
Now we can start training our YOLO model:
dataset = DatasetGenerator().generate()
optimizer = tf.keras.optimizers.Adam(LEARNING_RATE)
train_loss_metric = tf.keras.metrics.Mean(name='loss')
ckpt = tf.train.Checkpoint(epoch=tf.Variable(0), net=YOLO)
manager = tf.train.CheckpointManager(ckpt, './ckpts/YOLO', max_to_keep=3,
checkpoint_name='yolo')
@tf.function
def train_step(image, labels, objects_num):
with tf.GradientTape() as tape:
outputs = YOLO(image)
class_end = CELL_SIZE * CELL_SIZE * NUM_CLASSES
conf_end = class_end + CELL_SIZE * CELL_SIZE * BOXES_PER_CELL
class_probs = tf.reshape(outputs[:, 0:class_end], (-1, 7, 7, 20))
confs = tf.reshape(outputs[:, class_end:conf_end], (-1, 7, 7, 2))
boxes = tf.reshape(outputs[:, conf_end:], (-1, 7, 7, 2*4))
predicts = tf.concat([class_probs, confs, boxes], 3)
loss = yolo_loss(predicts, labels, objects_num)
train_loss_metric(loss)
grads = tape.gradient(loss, YOLO.trainable_weights)
optimizer.apply_gradients(zip(grads, YOLO.trainable_weights))
from datetime import datetime
print("{}, start training.".format(datetime.now()))
for i in range(EPOCHS):
train_loss_metric.reset_states()
ckpt.epoch.assign_add(1)
for idx, (image, labels, objects_num) in enumerate(dataset):
train_step(image, labels, objects_num)
print("{}, Epoch {}: loss {:.2f}".format(datetime.now(), i+1, train_loss_metric.result()))
save_path = manager.save()
print("Saved checkpoint for epoch {}: {}".format(int(ckpt.epoch), save_path))
Predict Test data¶
After training, we should run testing on the test data images. Since we should output a txt file in similar format as pascal_voc_training_data.txt, we should change the YOLO output box [xcenter, ycenter, width, height] format back to [xmin, ymin, xmax, ymax].
Process YOLO's predictions¶
Below is the function process the output of the YOLO network and return the most confident box and its corresponding class and confidence score.
def process_outputs(outputs):
"""
Process YOLO outputs into bou
"""
class_end = CELL_SIZE * CELL_SIZE * NUM_CLASSES
conf_end = class_end + CELL_SIZE * CELL_SIZE * BOXES_PER_CELL
class_probs = np.reshape(outputs[:, 0:class_end], (-1, 7, 7, 20))
confs = np.reshape(outputs[:, class_end:conf_end], (-1, 7, 7, 2))
boxes = np.reshape(outputs[:, conf_end:], (-1, 7, 7, 2*4))
predicts = np.concatenate([class_probs, confs, boxes], 3)
p_classes = predicts[0, :, :, 0:20]
C = predicts[0, :, :, 20:22]
coordinate = predicts[0, :, :, 22:]
p_classes = np.reshape(p_classes, (CELL_SIZE, CELL_SIZE, 1, 20))
C = np.reshape(C, (CELL_SIZE, CELL_SIZE, BOXES_PER_CELL, 1))
P = C * p_classes
#P's shape [7, 7, 2, 20]
#choose the most confidence one
max_conf = np.max(P)
index = np.argmax(P)
index = np.unravel_index(index, P.shape)
class_num = index[3]
coordinate = np.reshape(coordinate,
(CELL_SIZE,
CELL_SIZE,
BOXES_PER_CELL,
4))
max_coordinate = coordinate[index[0], index[1], index[2], :]
xcenter = max_coordinate[0]
ycenter = max_coordinate[1]
w = max_coordinate[2]
h = max_coordinate[3]
xcenter = (index[1] + xcenter) * (IMAGE_SIZE/float(CELL_SIZE))
ycenter = (index[0] + ycenter) * (IMAGE_SIZE/float(CELL_SIZE))
w = w * IMAGE_SIZE
h = h * IMAGE_SIZE
xmin = xcenter - w/2.0
ymin = ycenter - h/2.0
xmax = xmin + w
ymax = ymin + h
return xmin, ymin, xmax, ymax, class_num, max_conf
Build Test dataset Iterator¶
test_img_files = open('./pascal_voc_testing_data.txt')
test_img_dir = './VOCdevkit_test/VOC2007/JPEGImages/'
test_images = []
for line in test_img_files:
line = line.strip()
ss = line.split(' ')
test_images.append(ss[0])
test_dataset = tf.data.Dataset.from_tensor_slices(test_images)
def load_img_data(image_name):
image_file = tf.io.read_file(test_img_dir+image_name)
image = tf.image.decode_jpeg(image_file, channels=3)
h = tf.shape(image)[0]
w = tf.shape(image)[1]
image = tf.image.resize(image, size=[IMAGE_SIZE, IMAGE_SIZE])
image = (image/255) * 2 - 1
return image_name, image, h, w
test_dataset = test_dataset.map(load_img_data, num_parallel_calls = tf.data.experimental.AUTOTUNE)
test_dataset = test_dataset.batch(32)
ckpt = tf.train.Checkpoint(net=YOLO)
ckpt.restore('./ckpts/YOLO/yolo-3')
<tensorflow.python.training.tracking.util.CheckpointLoadStatus at 0x7fbc9c2e29d0>
@tf.function
def prediction_step(img):
return YOLO(img, training=False)
Make Prediction and Output to txt file¶
To run the evaluation program we provide, you should output your prediction with this format(similar but different with pascal_voc_training_data.txt)
image_name {xmin_i ymin_i xmax_i ymax_i class_i confidence_score} (repeat number of objects times)
for each line in the txt file.
Note: it is also acceptable if there are multiple lines with same image name(different box predictions).
output_file = open('./test_prediction.txt', 'w')
for img_name, test_img, img_h, img_w in test_dataset:
batch_num = img_name.shape[0]
for i in range(batch_num):
xmin, ymin, xmax, ymax, class_num, conf = process_outputs(prediction_step(test_img[i:i+1]))
xmin, ymin, xmax, ymax = xmin*(img_w[i:i+1]/IMAGE_SIZE), ymin*(img_h[i:i+1]/IMAGE_SIZE), xmax*(img_w[i:i+1]/IMAGE_SIZE), ymax*(img_h[i:i+1]/IMAGE_SIZE)
#img filename, xmin, ymin, xmax, ymax, class, confidence
output_file.write(img_name[i:i+1].numpy()[0].decode('ascii')+" %d %d %d %d %d %f\n" %(xmin, ymin, xmax, ymax, class_num, conf))
output_file.close()
Run Evaluation Metric¶
Finally, you can use following example code to run the evaluation program we provide and output the csv file. Please submit the csv file onto Kaggle.
The evaluation program calculates mean Average Precision(mAP) of your output boxes. It will first sort your prediction by your confidence score, and get the Precision/Recall curve:
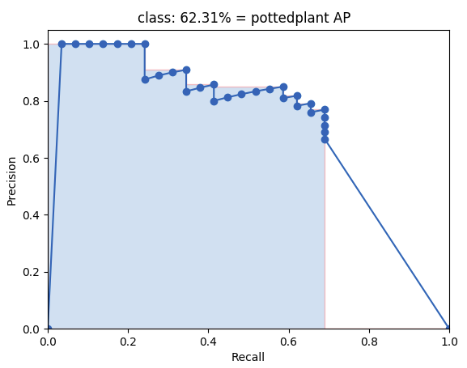
Then the area under this curve is the mAP of this class.
We separated test data into 10 groups, and calculates the mAP of each class for each group. Your goal is to maximize the total mAP score.
import sys
sys.path.insert(0, './evaluate')
import evaluate
#evaluate.evaluate("input prediction file name", "desire output csv file name")
evaluate.evaluate('./test_prediction.txt', './output_file.csv')
Visualization¶
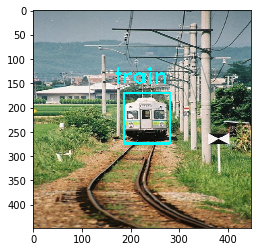
Here we provide a simple code to draw the predicted bounding box and class onto the image and visualize using matplot.
%matplotlib inline
import matplotlib.pyplot as plt
import cv2
np_img = cv2.imread('./VOCdevkit_test/VOC2007/JPEGImages/000002.jpg')
resized_img = cv2.resize(np_img, (IMAGE_SIZE, IMAGE_SIZE))
np_img = cv2.cvtColor(resized_img, cv2.COLOR_BGR2RGB)
resized_img = np_img
np_img = np_img.astype(np.float32)
np_img = np_img / 255.0 * 2 - 1
np_img = np.reshape(np_img, (1, IMAGE_SIZE, IMAGE_SIZE, 3))
y_pred = YOLO(np_img, training=False)
xmin, ymin, xmax, ymax, class_num, conf = process_outputs(y_pred)
class_name = classes_name[class_num]
cv2.rectangle(resized_img, (int(xmin), int(ymin)), (int(xmax), int(ymax)), (0, 255, 255), 3)
cv2.putText(resized_img, class_name, (0, 200), 2, 1.5, (0, 255, 255), 2)
plt.imshow(resized_img)
plt.show()

As you can see, the result of current model needs some improvements. After training, your model shall have at least the capability to output prediction like this:
Other Models¶
Fast-RCNN¶
Roi pooling (api source)¶
Region of interest pooling (RoI pooling) is an operation widely used in object detecion tasks using convolutional neural networks. It was proposed by Ross Girshick (paper) and it achieves a significant speedup of both training and testing. It also maintains a high detection accuracy. The layer takes two inputs:
- A fixed-size feature map obtained from a deep convolutional network with many convolutions and max pooling layers.
- An N-by-5 matrix of representing a list of regions, where N is a number of RoIs. The first columns represents the image index and the remaining four are the coordinates of the top left and bottom right corners of the region.
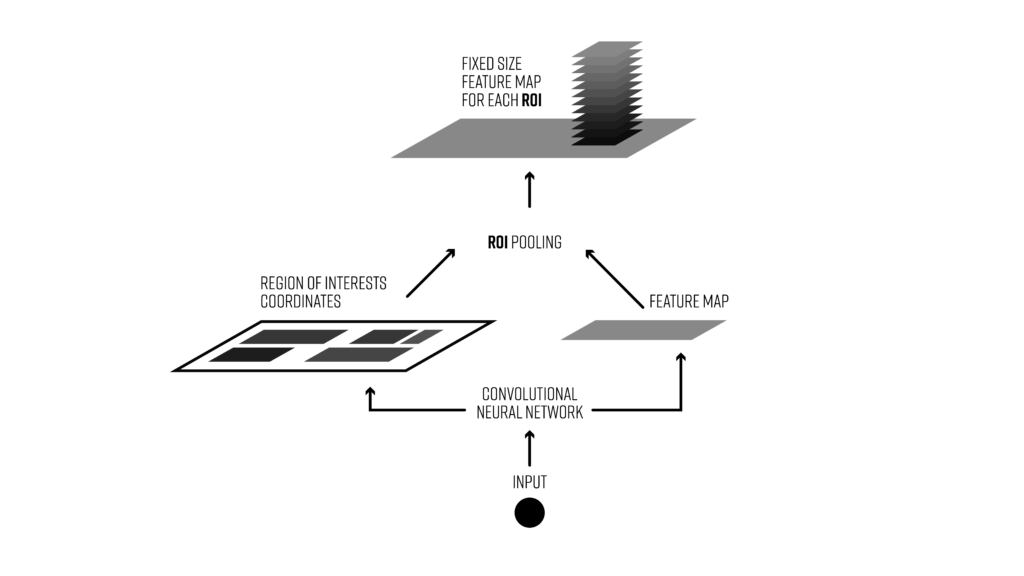
What does the RoI pooling actually do? For every region of interest from the input list, it takes a section of the input feature map that corresponds to it and scales it to some pre-defined size (e.g., 7×7). The scaling is done by:
- Dividing the region proposal into equal-sized sections (the number of which is the same as the dimension of the output)
- Finding the largest value in each section
- Copying these max values to the output buffer
The result is that from a list of rectangles with different sizes we can quickly get a list of corresponding feature maps with a fixed size.
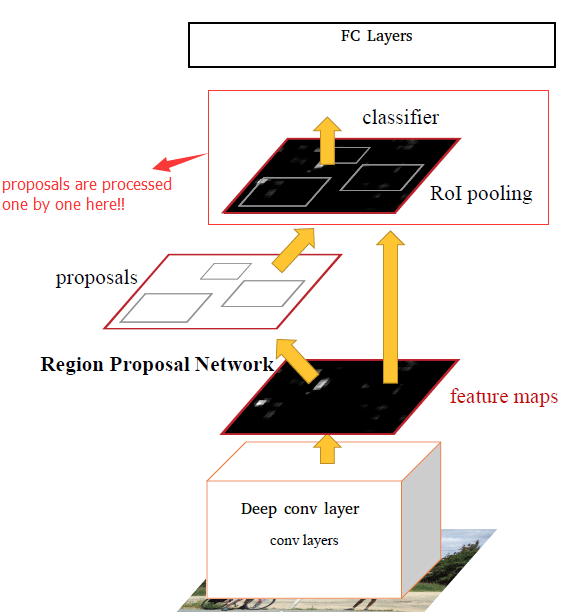
Faster-RCNN¶
The main idea is use the last conv layers to infer region proposals. Faster-RCNN consists of two modules.
- Region Proposal Network (RPN): Gives a set of rectangles based on deep convolution layer.
- Fast-RCNN RoI Pooling layer: Classify each proposal, and refining proposal location.
Precautions¶
Scoring and Report¶
Your score will be part of the final private result on Kaggle and part of your report.
- Your report(
.ipynbfile) should have:- Your code
- What kind of models you have tried and how did they work.
- Anything you've done and want to tell us.
- What problems occured and how did you solve them.
What you can do¶
- Implement other models by yourself.
- Load pretrained models trained on ImageNet. e.g. vgg19, resnet, etc. (ex. tf.keras.application)
- Data augmentation.
What you should NOT do¶
- Load pretrained object detection model weights directly from other sources.
- Clone other's project from github or other sites. (You should implement by yourself).
- Plagiarize codes from other teams.
- Pretrain your network on other dataset (you can only use the pascal data we provided on Kaggle).
- Use the groundtruth to generate output.
Competition timeline¶
- 2025/10/16(Thu.) competition announced.
- 2025/11/11(Tue.) 23:59 competition deadline.
- 2025/11/16(Sun.) 23:59 report deadline.
- 2025/11/20(Thu.) winner teams share.